Журнал "Дорожники". Внедрение автоматической системы весогабаритного контроля автотранспорта на дорожной сети РФ: перспективы развития.
На площадке Торгово-промышленной палаты РФ предложили проект универсальной концепции внедрения комплексной программы весогабаритного контроля автомобильного транспорта.
С июля 2017 года полностью прекратилось выделение инспекторов ГИБДД для осуществления весогабаритного контроля на стационарных и передвижных постах. На фоне этого возникла необходимость срочного внедрения автоматических систем, реализующих мониторинг параметров АТС в потоке движения.
Концепция программы весогабаритного контроля основана на опыте, полученном профильными экспертами-членами НТС ТПП РФ и привлеченными научно-техническими специалистами в процессе научно-методического сопровождения пилотных проектов, создания комплексов весогабаритного контроля на отечественных дорогах.
Об основных направлениях и перспективах развития автоматической системы весогабаритного контроля рассказал Владимир Речицкий, научный руководитель Научно-технического совета Торгово-промышленной палаты России.
– Владимир, какова ситуация с весогабаритным контролем в целом в стране?
– Мы наконец-то переходим к мировой практике использования автоматических систем весогабаритного контроля. Но для привлечения к административной ответственности за нарушение законодательно установленных весовых и габаритных параметров недостаточно мониторинга транспортных потоков, необходимо еще формирование доказательной базы для вынесения штрафных санкций.
Это послужило толчком для разработки концепции программы весогабаритного контроля. Мы обозначили основные направления развития отечественных АСВГК и их перспективы на ближайший период.
– Расскажите более детально о концепции. Что именно вы предлагаете?
– Во-первых, мы обращаемся к законодательному обеспечению процесса. Например, действующий в настоящее время Приказ № 1014 МВД РФ от 8 ноября 2012 года требует соблюдать точностные характеристики (+/–11 %) при измерении осевой нагрузки АТС в пределах 1500–20 тыс. кг в диапазоне скоростей от 20 до 140 км/ч. То есть для того чтобы провести метрологические испытания любого комплекса весогабаритного контроля, необходимо прогнать АТС с запредельной с точки зрения безопасности скоростью и осевой нагрузкой в 20 т на каждую из осей через испытуемый комплекс. А потом еще и подтвердить, что разброс измеренной осевой нагрузки уложится в заданные 11 %. Мы рекомендуем снизить скоростной предел до 8–110 км/ч для работы комплексов весогабаритного контроля.
Далее обращаемся к нормативным документам Росавтодора, в частности к «Техническим требованиям к оборудованию автоматических пунктов весогабаритного контроля на автомобильных дорогах общего пользования федерального значения» № 1328-р от 20 июля 2016 года.
Практически единственной «организационно-технической мерой для предотвращения уклонения от весогабаритного контроля» в упомянутых выше Технических требованиях предлагается частичный вынос весовых датчиков за пределы проезжей части на обочину не менее чем на 25 см от краевой разметки.
Заметим, что, согласно ГОСТ Р 52399–2005 «Геометрические элементы автомобильных дорог», ширина краевой полосы у обочины, к примеру, у основных подведомственных Росавтодору федеральных дорог категорий 1А, 1Б, 1В составляет 0,75 м, у разделительной полосы дороги – 1,0 м. За ней располагается укрепленная обочина шириной в 1,75 м. Весовой датчик не нее не вытащить, грамотно и надежно разместить его можно только на краевой полосе, совпадающей по структуре дорожных одежд с основной полосой. Да и кто из рачительных дорожников увеличит длину пьезоэлектрического весового датчика стоимостью около тысячи евро за погонный метр на 75–100 см, когда в требованиях Росавтодора достаточным для предотвращения объезда зоны взвешивания признан дополнительный участок датчика в 25 см. Так что недели через две-три на месте укрепленной обочины в зоне взвешивания образуется некий аналог колеи, а попросту разрушенная обочина.
Поэтому нами предложены корректировки Технических требований Росавтодора в части «оформления» дороги в зоне взвешивания.
– С точки зрения метрологического сопровождения что-то изменится?
– Очень важный момент в этом случае – правильно установить периодичность поверки комплексов весогабаритного контроля. Привести к шестимесячному межпроверочному периоду и разработать специальное поверочное средство, которое должно реализовать осевую нагрузку в рабочем диапазоне комплексов весогабаритного контроля (1500–20 тыс. кг) в интервале скоростей, например, 8–110 км/ч.
Применительно к первичным преобразователям осевой нагрузки – прецизионным линейным датчикам веса – следует озаботиться созданием комплекса стендового оборудования, необходимого для их испытаний в целях утверждения типа и первичной поверки, а также для обеспечения процедуры последующей паспортизации. Прежде всего речь идет о прецизионном измерительном стенде, обеспечивающем многократное приложение нормированной (с учетом заданного динамического диапазона) нагрузки в выбранной точке датчика, а также последовательное пошаговое ее перемещение по всей длине датчика.
Вторым стендом комплекта служит стенд для оценки наработки датчика на отказ. Из практики применения монтируемых в дорожном полотне наиболее распространенных типов прецизионных весовых датчиков (на основе чувствительных элементов пьезоэлектрического или тензометрического механизма действия) подобные датчики должны обеспечивать заданные параметры после 10 миллионов циклов нагружений.
– Как будут размещать датчики в зоне контроля?
– Сегодня максимальное количество автоматических устройств весового контроля устанавливается на наиболее распространенных отечественных, прежде всего в составе региональных дорожных сетей, двухполосных дорогах II–IV категорий, где их доля значительно превышает 90 % (на федеральных трассах доля двухполосных дорог составляет сегодня примерно 86 %).
На рисунке 1 схематично изображена типичная двухполосная дорога с полосами 3, 4 встречного движения и проиллюстрированы ее основные элементы. Тот же самый чертеж может иллюстрировать и структуру одной из симметричных частей четырехполосной дороги с центральной разделительной зоной безопасности и ограждением по ее границам. В этом случае полосы 3, 4 предназначены уже для движения в попутном направлении, а смежное с ними барьерное ограждение 7 размещается на смежной с ними границе разделительной зоны четырехполосной дороги.
рис. 1. Пример двухполосной дороги, планируемой для установки комплексов весогабаритного контроля:
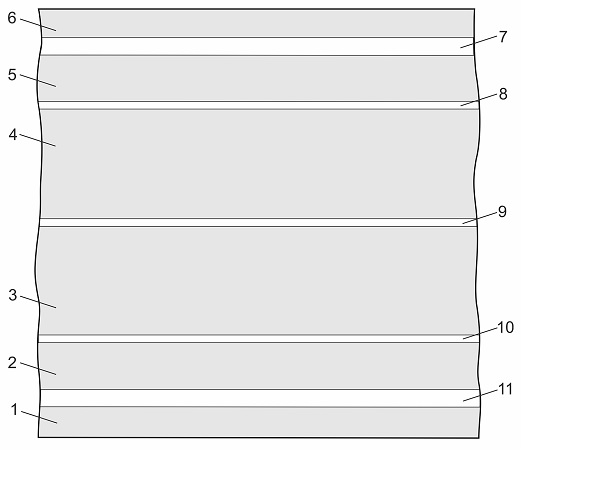
1, 6 – неукрепленная обочина; 2, 5 – краевые полосы безопасности со стороны обочины дороги (с учетом ГОСТ Р 52399–2005); 3, 4 – смежные полосы, предназначенные для движения в противоположном направлении; 7, 11 – барьерные ограждения со стороны обочины (с учетом ГОСТ Р 52289–2004); 8, 10 – краевая разметка со стороны краевой полосы безопасности со стороны обочины дороги (с учетом ГОСТ Р 51256–2011, тип 1.1); 9 – разметка между полосами встречного движения (с учетом ГОСТ Р 51256–2011, тип 1.1)
Для обеспечения функционирования весоизмерительного модуля в его составе предусмотрены расположенные в дорожном полотне первичные преобразователи – линейные прецизионные пьезоэлектрические датчики силы на монокристаллических чувствительных элементах (14–16;17–19 рис. 2) и ряд вспомогательных устройств (датчик скатности колесных сборок 12–13, индуктивная петля 20). Датчики веса и скатности перекрывают всю контролируемую зону, включающую как полосу движения, так и примыкающую к ней краевую полосу.
Рис. 2. Схема размещения элементов комплексов весогабаритного контроля, осуществляющего контроль части дороги категории II, включающей крайнюю полосу движения и примыкающую к ней краевую полосу:
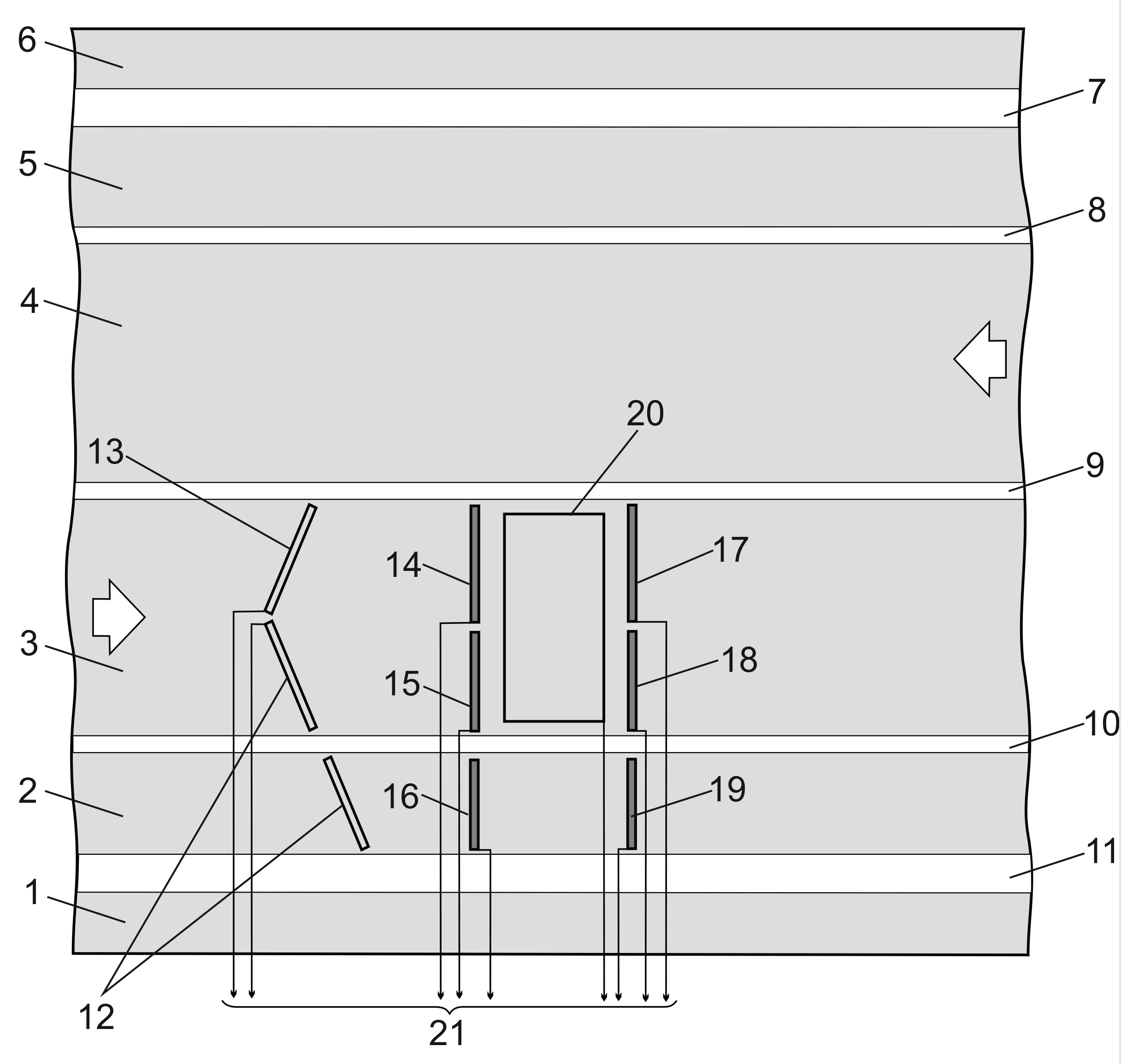
1, 6 – неукрепленная обочина; 2, 5 – краевые полосы безопасности со стороны обочины дороги (с учетом ГОСТ Р 52399–2005); 3, 4 – смежные полосы, предназначенные для движения в противоположном направлении; 7, 11 – барьерные ограждения со стороны обочины (с учетом ГОСТ Р 52289–2004); 8, 10 – краевая разметка со стороны краевой полосы безопасности со стороны обочины дороги (с учетом ГОСТ Р 51256–2011, тип 1.1); 9 – разметка между полосами встречного движения (с учетом ГОСТ Р 51256–2011, тип 1.1); 12, 13 – вспомогательные датчики силы для оценки позиционирования ТС, определения числа колес на оси ТС и числа скатов в колесных сборках ТС, а также фиксации выезда ТС за пределы проезжей части на краевую полосу безопасности у обочины дороги; 14–16; 17–19 – прецизионные датчики силы для определения осевых нагрузок ТС, следующего в контролируемой зоне, включающей как полосу движения, так и примыкающую к ней краевую полосу, а также полноценного взвешивания АТС, совершающего таковой объезд при его частичном выезде на краевую полосу со стороны обочины; 20 – индуктивная петля; 21 – соединение с устройством обработки
При необходимости тотального перекрытия, например двухполосной дороги с обеспечением взвешивания ТС независимо от его положения на дороге, комплексы располагаются на обеих полосах дороги симметрично и соосно друг другу (рис. 3) и входящие в их состав прецизионные датчики силы совокупно перекрывают все сечение дороги между барьерными ограждениями 7, 11. (На рис. 3 датчики второго комплекса, размещенные симметрично и аналогичные датчикам первого комплекса, отдельными позициями не обозначены.)
Рис. 3. Схема симметричного размещения комплексов в общей зоне взвешивания на смежных полосах встречного движения двухполосной дороги, обеспечивающего взвешивание ТС, движущегося в любом направлении в пределах всей контролируемой части дороги, включающей смежные полосы движения и примыкающие к ним краевые полосы:
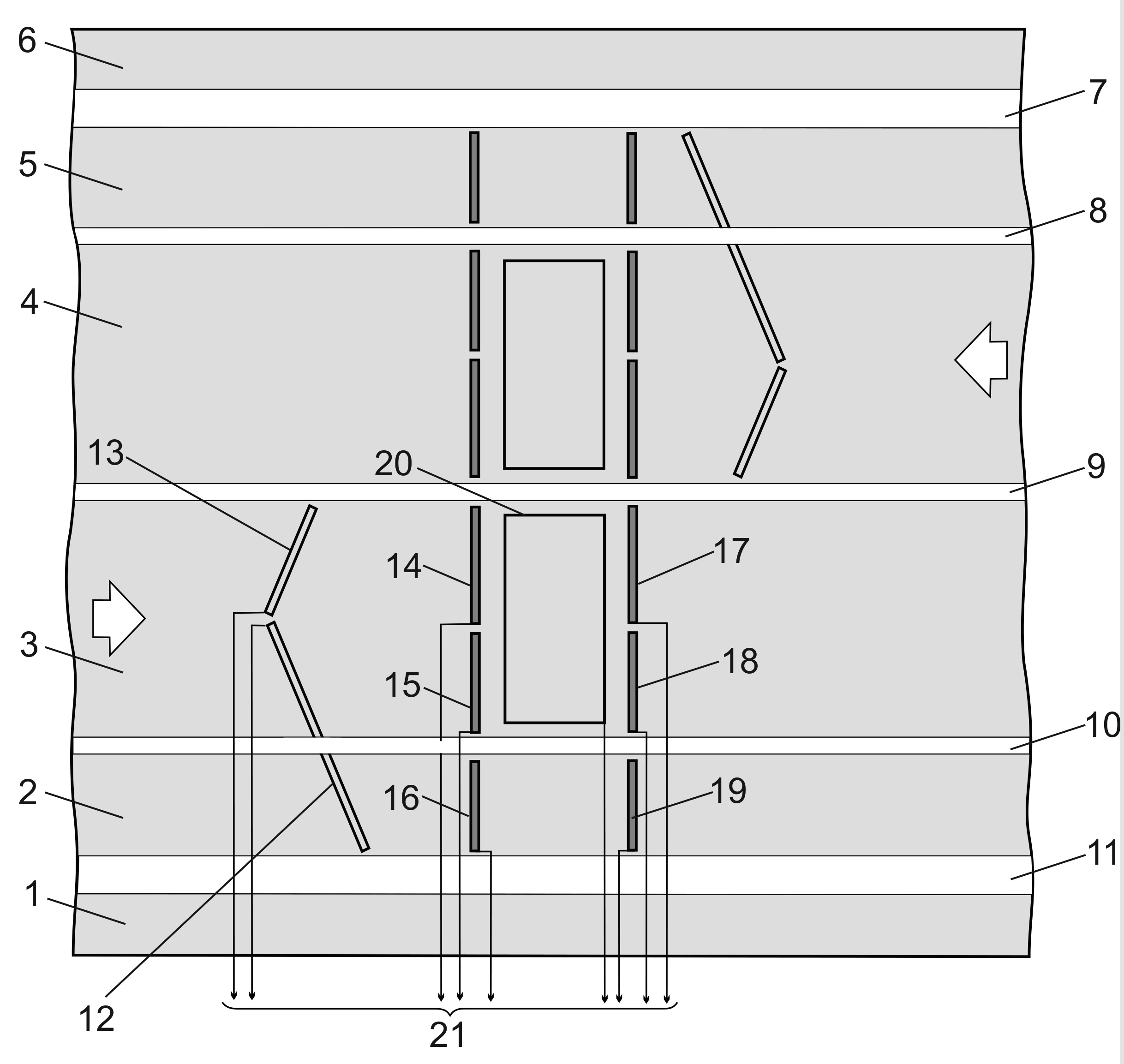
1, 6 – неукрепленная обочина; 2, 5 – краевые полосы безопасности со стороны обочины дороги (с учетом ГОСТ Р 52399–2005); 3, 4 – смежные полосы, предназначенные для движения в противоположном направлении;
7, 11 – барьерные ограждения со стороны обочины ( с учётом ГОСТ Р 52289–2004); 8, 10 – краевая разметка со стороны краевой полосы безопасности со стороны обочины дороги (с учетом ГОСТ Р 51256–2011, тип 1.1); 9 – разметка между полосами встречного движения (с учетом ГОСТ Р 51256–2011, тип 1.1); 12, 13 – вспомогательные датчики силы для оценки позиционирования ТС, определения числа колес на оси ТС и числа скатов в колесных сборках ТС, а также фиксации выезда ТС за пределы проезжей части на краевую полосу безопасности у правой обочины дороги; 14–16; 17–19 – прецизионные датчики силы для определения осевых нагрузок ТС, следующего в контролируемой зоне, включающей как полосу движения, так и примыкающую к ней краевую полосу, а также полноценного взвешивания ТС, совершающего таковой объезд при его частичном выезде на краевую полосу со стороны обочины; 20 – индуктивная петля; 21 – соединение с устройством обработки
При необходимости тотального перекрытия, например двухполосной дороги с обеспечением взвешивания ТС независимо от его положения на дороге, комплексы располагаются на обеих полосах дороги симметрично и соосно друг другу (рис. 3) и входящие в их состав прецизионные датчики силы совокупно перекрывают все сечение дороги между барьерными ограждениями 7, 11. (На рис. 3 датчики второго комплекса, размещенные симметрично и аналогичные датчикам первого комплекса, отдельными позициями не обозначены.)
В первом случае барьерное ограждение 7, изображенное на рисунке 3, будем считать расположенным на разделительной полосе четырехполосной дороги, а краевую полосу 5 – частью полосы безопасности по оси дороги. Во втором случае примем вариант расположения элементов комплекса,, изображенный на рисунке 3, за иллюстрацию двухполосной дороги, обрамленной барьерными ограждениями 11, 7 с примыкающим к ним со стороны проезжей части краевыми полосами безопасности 2, 5.
– Стремитесь ли вы повысить точность весовых измерений на автоматических комплексах весогабаритного контроля?
– В последнее время сравнительно неожиданно особую актуальность приобрела проблема принципиального повышения точности измерений осевой нагрузки и массы ТС в автоматическом режиме.
Казалось бы, довольно давно ставшие практически общепринятыми в мировой практике погрешности ±11 % для осевой нагрузки и ±5 % для общей массы ТС всех устраивают и искать пути повышения точности пока не требуется. (Заметим, что физическая реализация средств измерения соответствующих параметров ТС практически достигла предела своих возможностей.)
Но эти рассуждения справедливы только в случае использования автоматических комплексов весогабаритного контроля для преселекции или статистики транспортных потоков. Задача прецизионного измерения весовых параметров делегируется в этом случае расположенным непосредственно вслед за ними обслуживаемым стационарным или передвижным постам весогабаритного контроля, реализующим взвешивание с погрешностью не более 2 %, что позволяет выявлять правонарушения при относительно небольших превышениях установленных нормативов. Только вот судьба сохранения стационарных и передвижных постов с 1 июля 2017 года, как уже отмечалось выше, весьма туманна.
В этой почти безнадежной для развития системы весогабаритного контроля ситуации вся надежда на автоматические комплексы. Однако их ограниченная точность позволит выявить только относительно крупные нарушения весовых нормативов. Отсюда и следует суперактуальная необходимость поиска возможностей повышения точности измерений. Но так как точностные возможности физической реализации процедуры взвешивания в потоке движения без снижения скорости практически исчерпаны, остается надежда только на системные решения.
Примером таковых может быть предложенная в последнее время процедура двухэтапного взвешивания, получившая название «ТАНДЕМ», иллюстрируемая на рисунке 4 на примере все той же двухполосной дороги.
Рис. 4. Последовательное размещение комплексов в общей полосе движения двухполосной дороги по схеме «ТАНДЕМ»:
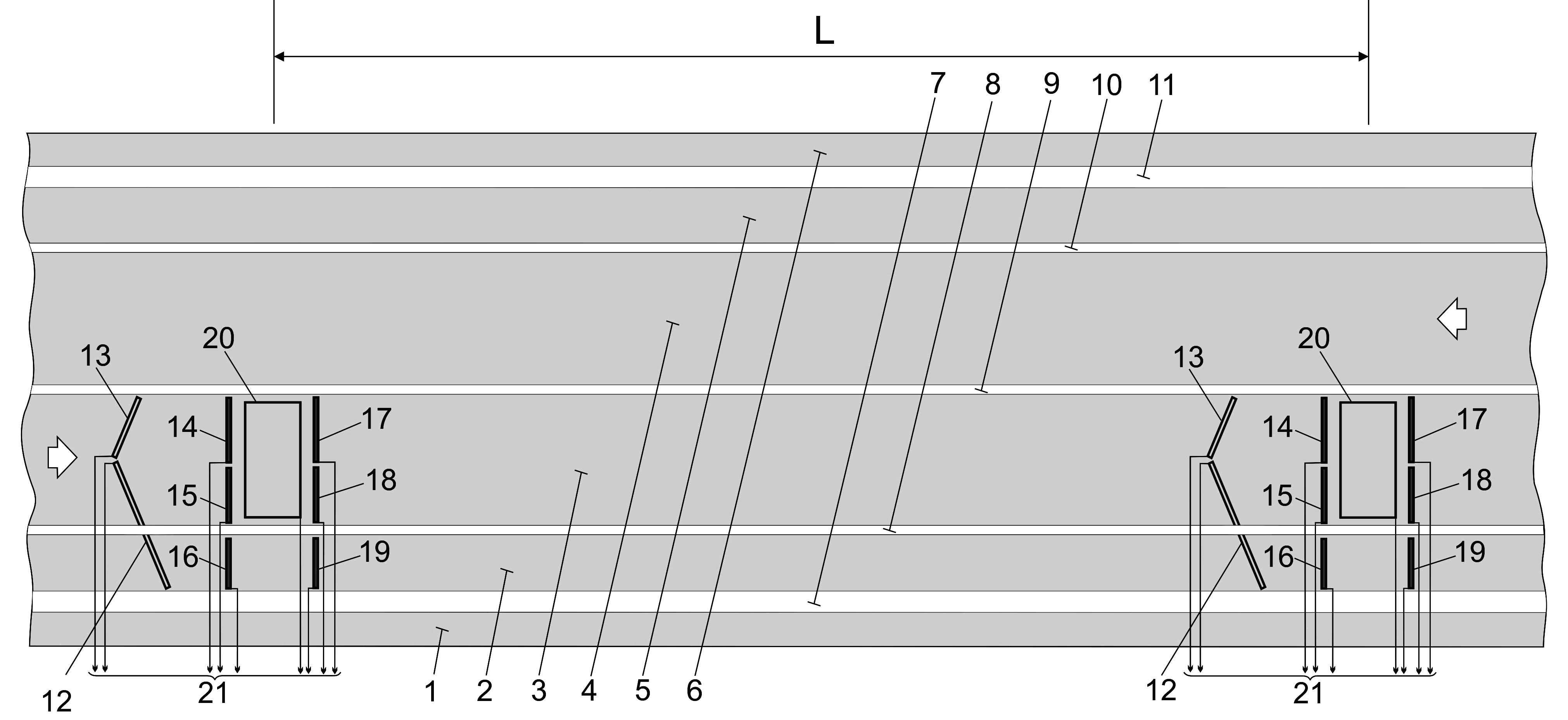
1, 6 – неукрепленная обочина; 2, 5 – краевые полосы безопасности со стороны обочин дороги (с учетом ГОСТ Р 52399–2005); 3,4 – смежные полосы, предназначенные для движения в противоположном направлении;
7, 11 – барьерные ограждения со стороны обочины (с учетом ГОСТ Р 52289–2004); 8, 10 – краевая разметка со стороны краевой полосы безопасности со стороны обочины дороги (с учетом ГОСТ Р 51256–2011, тип 1.1); 9 – разметка между полосами встречного движения (с учетом ГОСТ Р 51256–2011, тип 1.1); 12, 13 – вспомогательные датчики силы для оценки позиционирования ТС, определения числа колес на оси ТС и числа скатов в колесных сборках ТС, а также фиксации выезда ТС за пределы проезжей части на краевую полосу безопасности у правой обочины дороги; 14–16; 17–19 – прецизионные датчики силы для определения осевых нагрузок ТС, следующего в контролируемой зоне, включающей как полосу движения, так и примыкающую к ней краевую полосу, а также полноценного взвешивания ТС, совершающего таковой объезд при его частичном выезде на краевую полосу со стороны обочины; 20 – индуктивные петли; 21 – соединение с устройством обработки
Два практически идентичных по схеме размещения и составу датчиков автоматических комплекса весогабаритного контроля расположены в общей полосе движения на расстоянии L, как правило, величиной не менее максимально допустимой протяженности автопоезда и соединены (21) с общим для них устройством обработки. Результаты взвешивания на первом и втором устройствах усредняются, обеспечивая повышение точности измерения примерно в 1,4 раза, а затем вычисляется соответствующий поправочный коэффициент для последующей корректировки каждого из парциальных комплексов. При прохождении очередного ТС процедура повторяется, позволяя и далее наращивать точность измерений в режиме «самокалибровки».
Описанный выше прием является прототипом для более широкой реализации повышения точности автоматического взвешивания по мере прохождения конкретного ТС через расположенные вдоль его маршрута посты весового контроля. Естественно, что, в отличие от «ТАНДЕМА», в котором два последовательных поста взвешивания расположены на небольшом расстоянии друг от друга, использование усреднения по постам, находящимся на удалении, например 100–150 км друг от друга, потребует учета истраченного на этом расстоянии топлива, исключения факта частичной догрузки или разгрузки ТС на данном промежутке (например, путем контроля времени его прохождения) и т. п. Однако итоговый результат оправдывает эти усилия.
– Как будет происходить идентификация транспортных средств?
– Получить требуемые данные по качеству идентификации госномеров от разработчиков и пользователей средств фотовидеофиксации нарушений ПДД в официальном порядке практически нереально. О степени вероятности автоматической расшифровки номерных знаков принято говорить на понятийном уровне – «хорошая или очень хорошая». В обоих случаях подразумевается достоверная расшифровка порядка 90–95 % номеров. Это, конечно, возможно, но только в случае идеальных погодных условий, не очень характерных для нашей страны. В плохую погоду (туман, дождь, снегопад), а также при загрязненных номерах вероятность правильного определения номерного знака лежит в пределах 35–40 %. То есть абсолютное большинство нарушителей скоростного и весогабаритного режимов проезжают соответствующие посты совершенно безнаказанно, «мимо кассы». Не говоря уже о преднамеренном сокрытии ГРЗ - у меня есть статистика по Костроме и Рязани – более 30 % грузовиков ездят с заклеенными номерами.
Рекомендации в данной части очевидны: автотранспортное средство необходимо снабдить дополнительным идентификационным признаком, притом «всепогодным». Это классическая радиочастотная метка (RFID); современные конструкции пассивных радиометок обеспечивают надежный обмен информацией со считывателем (ридером) на расстоянии до 15–20 метров. При этом сегодня как сами метки, так и считыватели серийно выпускаются отечественными предприятиями. На первом этапе логично снабдить радиометками грузовые автомобили и одновременно оборудовать ридерами автоматические посты фотовидеофиксации скоростных нарушений, посты весогабаритного контроля и контрольные посты Платона. Введение в практику дополнительного идентификационного признака параллельно решит целый ряд проблем обнаружения поддельных номеров, розыска угнанных АТС и не менее актуальных вопросов общественной безопасности.
– Каковы перспективы развития автоматического весогабаритного контроля?
– Росавтодор анонсирует появление на дорогах федерального значения к 2020 году 387 автоматических пунктов весогабаритного контроля. С учетом их общей фактической протяженности на 1 января 2016 года в 51,9 тыс. км (прогнозировать прирост таковой гораздо сложнее, чем число гипотетических пока АПВГК) нас ожидает весьма амбициозная перспектива – покрытие дорожной сети с пространственным шагом в 134 км (в США на сегодня АПВГК расположены в среднем через 125 км). На региональных дорожных сетях (515,8 тыс. км) лет за пять-шесть общее число АПВГК подтянется, очевидно, к той же цифре, но четыре сотни АПВГК сосредоточатся в основном только в «продвинутых» регионах, где пространственный шаг их расстановки распределится на наиболее загруженных дорогах в весьма произвольных пределах, скажем, от 150 до 400 км, чего будет явно недостаточно для полноценного контроля транспортных потоков в целом.
И в этой ситуации главная надежда – на остро назревшее совмещение весогабаритного контроля и системы «Платон». Данная идея давно зрела в умах приверженцев обеих технологий, в том числе и рамках НТС ТПП РФ. На федеральных сетях уже к июлю 2017 году 481 контрольная рамка, убедительно продекларированная оператором «Платона» – ООО «РТ-Инвест Транспортные Системы» – при более чем логичном и технически легко достижимом совмещении с «конструктивно близкими» им АПВГК, обеспечит уникальное покрытие федеральных дорог в части мониторинга нарушений весогабаритных параметров АТС и подведет итоговую ситуацию к неизбежности наказания для нарушителей законодательно установленных нормативов. В реальной перспективе значительно продвинет вперед эффективность аналогичной программы на региональных дорожных сетях, внимание к которым «Платон» уже активно демонстрирует.
Только вот достижение амбициозных результатов должно опираться не только на синергетический эффект от логичного объединения двух упомянутых программ, но и на максимально возможную унификацию и локализацию используемых средств измерения и элементной базы. Внешнее изобилие таковых, предлагаемых мировым и гораздо более скромным пока отечественным рынками, не должно расслаблять разработчиков. Скорее, наоборот, проблема оптимального выбора используемой техники должна опираться на постоянный системный анализ функциональных возможностей всех вариантов. Заметим, что именно такой концептуальный и непрерывный мониторинг рынка соответствующей техники уже более пяти лет осуществляют профильные специалисты НТС ТПП РФ.
Беседовал Алексей Петякин. www.dorogniki.com